
Experiencias en robótica quirúrgica: del laboratorio al quirófano




Fecha: 11/09/2017
Idioma: Castellano
Web: ver aquí
Autor: Víctor F. Muñoz Martinez
Procedencia: Laboratorio de robótica médica, Departamento de Ingeniería de Sistemas y Automática,
Universidad de Málaga
Son algo más de mil años con el mismo concepto de instrumentos quirúrgicos, desde que el cirujano cordobés Abu’l Qasim Khalaf ibn ‘Abbas al-Zahrawi, conocido como Abulcasís, (936 -1013) proporcionase el primer legado escrito para la realización de procedimientos quirúrgicos. Por supuesto, durante el transcurso de los siglos, se han añadido avances hasta nuestros días fundamentales para la realización del acto quirúrgico (desde de anestesia, hasta el control de la asepsia) sin los cuales no se entendería la cirugía moderna. Sin embargo, el concepto fundamental a prevalecido: resulta necesario exponer totalmente la estructura anatómica a tratar para que el cirujano pueda realizar lo más cómodamente posible la intervención.
La combinación de dos hombres, a finales del pasado siglo, cambió este escenario. Se trataba, en primer lugar, del ginecólogo alemán Kurt Semm (1927-2012), y posteriormente de la visión del profesor de cirugía de la Universidad de Washington, Richard M. Satava (1942-?). En concreto, el primero de ellos, a principio de los años ochenta del pasado siglo, introdujo el concepto de cirugía laparoscópica, que posteriormente ha evolucionado para incluir otros tipos de cirugía, conocidas en global, como técnicas de mínima invasión. La piedra angular común a todos estos procedimientos es abordar el interior del cuerpo del enfermo con la incisión más pequeño posible. Claro, esto conlleva el diseño de nuevos conceptos de instrumentos quirúrgicos y nuevas técnicas quirúrgicas donde el cirujano no puede realizar la tarea de forma tan cómoda como en cirugía abierta. Aquí es donde entra el concepto del Profesor Satava. En su labor como asesor de la Defense Advanced Research Projects Agency (DARPA), del Gobierno de Estados Unidos, imaginó el uso de robots tele-operados, instalados en un vehículo blindado, con el objeto de realizar las primeras curas a los heridos en combate.
Aquí, es donde se produjo la confluencia entre la cirugía mínimamente invasiva y la robótica. Esta última trascendió al escenario bélico y se introdujo como una herramienta más para estas técnicas quirúrgicas, con el objeto de paliar las dificultades su práctica. En efecto, el ya desaparecido asistente robótico AESOP, de la extinta empresa Computer Motion, registró la patente de este robot diseñado para guiar la cámara en la cirugía laparoscópica en 1998. Posteriormente, la compañía americana Intuitive Motion, heredera de tecnologías de la agencia DARPA, copó el mercado con su robot tele-operado Da-Vinci, que, aunque diseñado para abarcar multitud de procedimientos quirúrgicos por mínima invasión, ha encontrado su máxima utilidad en la resección total de la próstata. A partir de aquí, han llegado otros asistentes robóticos, buscando un carácter muy específico para ayudar a un tipo concreto de intervención, y así buscar hueco en el mercado que deje libre el sistema Da-Vinci. Así, el Spine-Assist de Mazor Robotics, especializado en la colocación de prótesis de la espina dorsal, o el CiberKnife de Accuray Incorporated, especializado en radioterapia son ejemplos de robots especializados en tareas concretas. También se pueden unir los robots dedicados a asistir a procedimientos neurológicos, como el Neuromate de Renishaw, o a la cirugía ortopédica como el Robodoc de THINK Surgical.




Figura 1. A la izquierda el robot CiberKnife especializado en la radioterapia focalizada, y a la derecha el sistema Da-Vinci, tele-operado por el cirujano y de carácter general para la cirugía de mínima invasión.
En este contexto, el grupo que dirijo del Laboratorio de Robótica Médica de la Universidad de Málaga[1], fruto de las investigaciones en el campo del uso de robots en cirugía de mínima invasión, ha desarrollado dos sistemas robóticos orientados a cirugía laparoscópica orientados al mercado. El primero de ellos, por simplicidad y orden cronológico fue el Endoscopic Robotic Manipulator (ERM), un asistente robótico encargado de mover el endoscopio siguiendo las órdenes verbales del cirujano. Fue un sistema diseñado para no requerir ninguna instalación especial en el quirófano para su uso, que fuese considerado como un instrumento habitual de uso diario. Se diferenciaba de sus competidores por el novedoso control de movimientos de sus articulaciones. En efecto, mientras que otros robots requieren un procedimiento de calibración para ajustar el movimiento del instrumental al punto de entrada de estos en el cuerpo del enfermo, el ERM no lo requería. Esto aceleraba su puesta en marcha y su uso inmediato en la intervención, incluso retirarlo rápidamente cuando era requerido. Una ventaja que facilitaba su uso cotidiano. Era la útil batidora en contra del trabajoso robot de cocina. Para el desarrollo del ERM se requirieron dos proyectos del Ministerio de Sanidad a través de instituto de salud Calos III (de 2000 al 2005), de suerte que, en el primero se desarrolló completamente el concepto del robot y el segundo se empleó para llevarlo a la clínica humana. En efecto, mientras que el primer prototipo, desarrollado en el primer periodo, mostraba las funcionalidades requeridas, requería de modificaciones que asegurasen su perfecto funcionamiento bajo cualquier circunstancia y que no dañaría un potencial paciente. Se requirió seguir normativas de seguridad en general, pasar pruebas de compatibilidad electromagnética y modificar su software para que incluyese tolerancia a fallos a la vez que se pudiese demostrar la perfecta funcionalidad de cada uno de los módulos que los componía. Todo esto se complementó con una propuesta de estudio clínico en el que se quería refutar la hipótesis de que con el uso del robot se podría acortar la duración de los procedimientos de colecistectomía laparoscópica. Así en mayo de 2004, se llevó a cirugía humana por primera vez, y después de los ensayos realizados, se concluyó que las duraciones de las intervenciones con el robot fueron del orden de diez minutos más cortas que las realizadas de forma tradicional. Gracias a las publicaciones científicas, la empresa SENER tuvo noticias del robot y decidió hacerse con las licencias que protegían al ERM y fabricar un nuevo prototipo industrial. Así, en 2009, el nuevo prototipo se probó en el Hospital Universitario Virgen de la Victoria de Málaga y estuvo unos años más utilizándose de forma experimental en hospitales de Barcelona. Tras concluir, que no existía mercado para el robot, SENER discontinuó este proyecto.


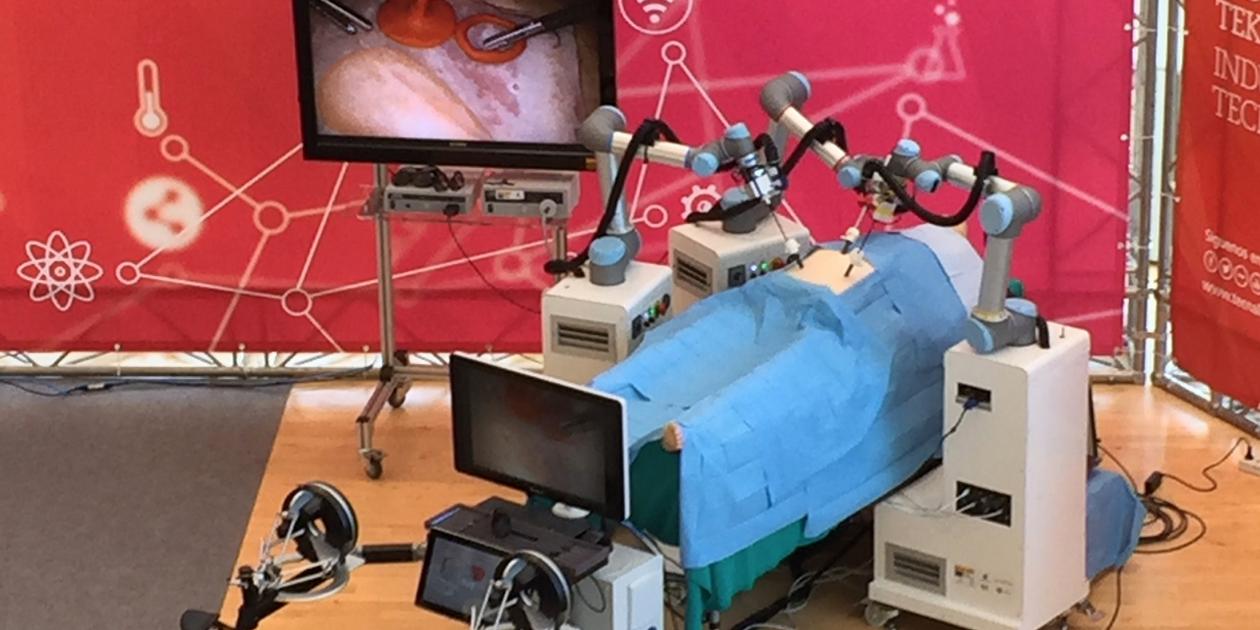
Figura 2. Asistente robótico ERM. A la izquierda se aprecia su forma de columna con brazo articulado preparado para portar el endoscopio y moverlo según las órdenes del cirujano. A la derecha, la primera intervención realizada en 2009 en el Hospital Universitario Virgen de la Victoria.
[visitante]Para seguir leyendo debe iniciar sesión o darse de alta en el portal[/visitante]
Para seguir leyendo debe iniciar sesión o darse de alta en el portal
Para poder escribir un comentario debe iniciar sesión o darse de alta en el portal.


























